


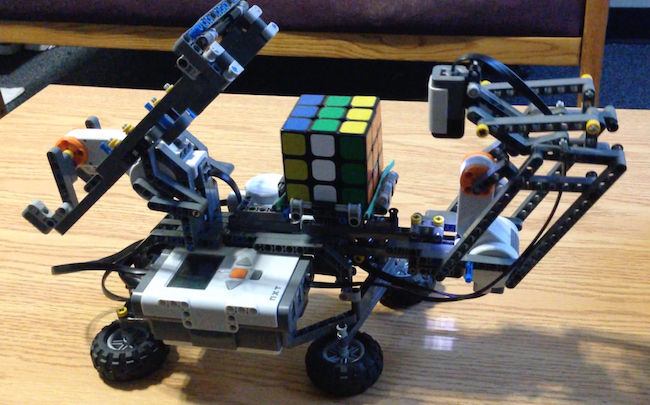
Neera - Rubik’s Cube solving robot
Quadcopter using LPC2148 ARM Controller
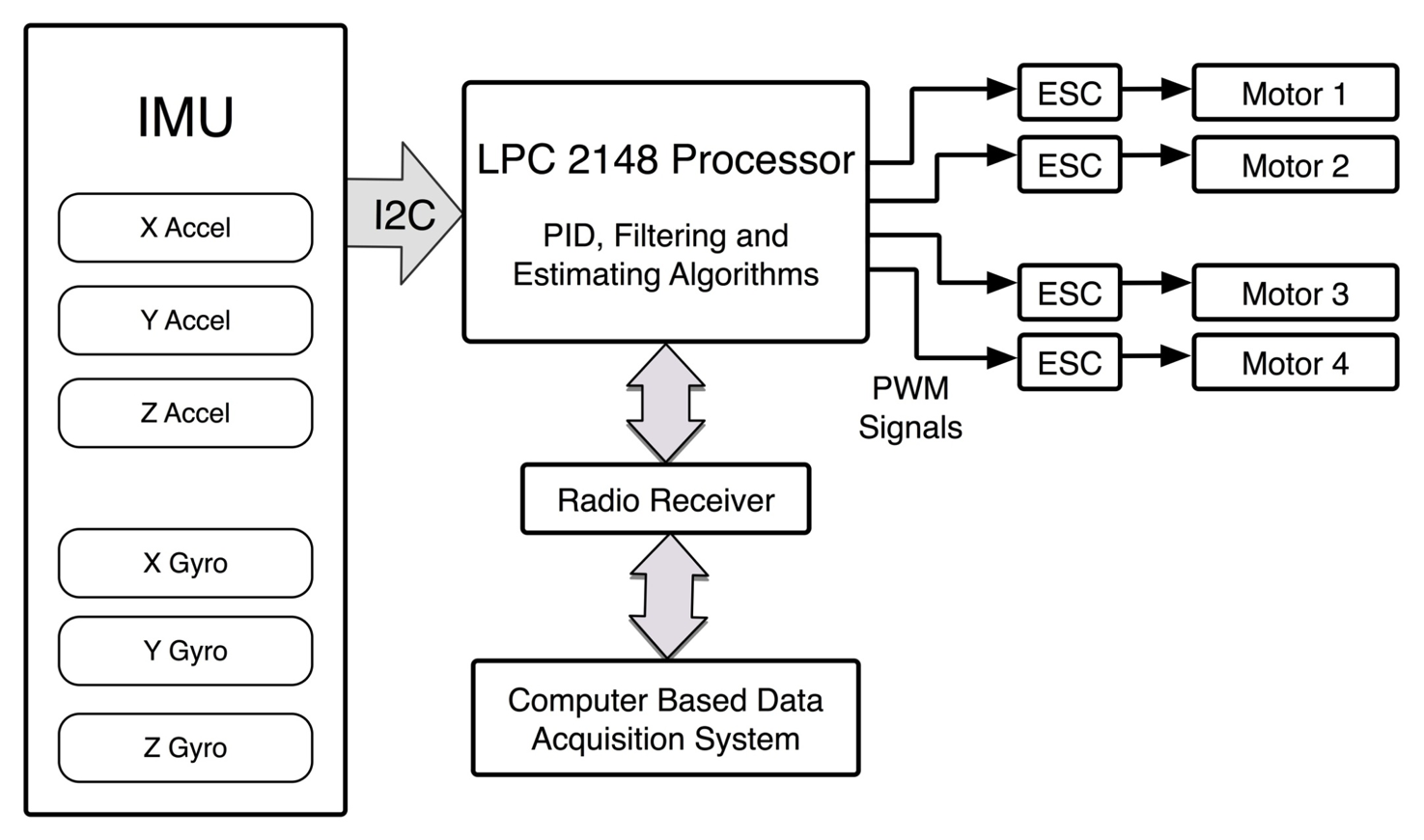
The aim of this project was to build a low cost prototype Quad-rotor and come up with system stabilization algorithm for the stabilizing the quad rotor. We came up with a mathematical model of a quad-rotor to correct pitch and roll errors by changing motor thrust and on getting meaningful data from inertial measurement unit by filtering noisy sensor data using complementary filters.
Based on this work, presented a paper entitled ‘Design of Quadcopter with closed loop control system’ at Visvesvaraya Technological University, Belgaum, in 2011.
Report PresentationProject Vyoma
Project Vyoma is a research project at RVCE to design Unmanned Aerial Vehicles (UAVs).
We worked on data logging system which captured data during flight from various sensors like GPS, pressure sensor and inertial measurement unit into a SD card to be retrieved later for analysis by aerodynamics team.
This data helped us improve the flight performance from 18th position (2010) to 8th position (2011) among 70 teams from all over the world in the SAE Aero Design event at Atlanta.
More information about the project can be found here.
Artificial Intelligence
Spam detection: Implemented Spam filter using Naive Bayes on TREC Public Spam Corpus.Clickstream Mining with Decision Trees: Mined click-stream data collected from Gazelle.com.Games: Peg Solitaire, PacMan (Adversial, A*).